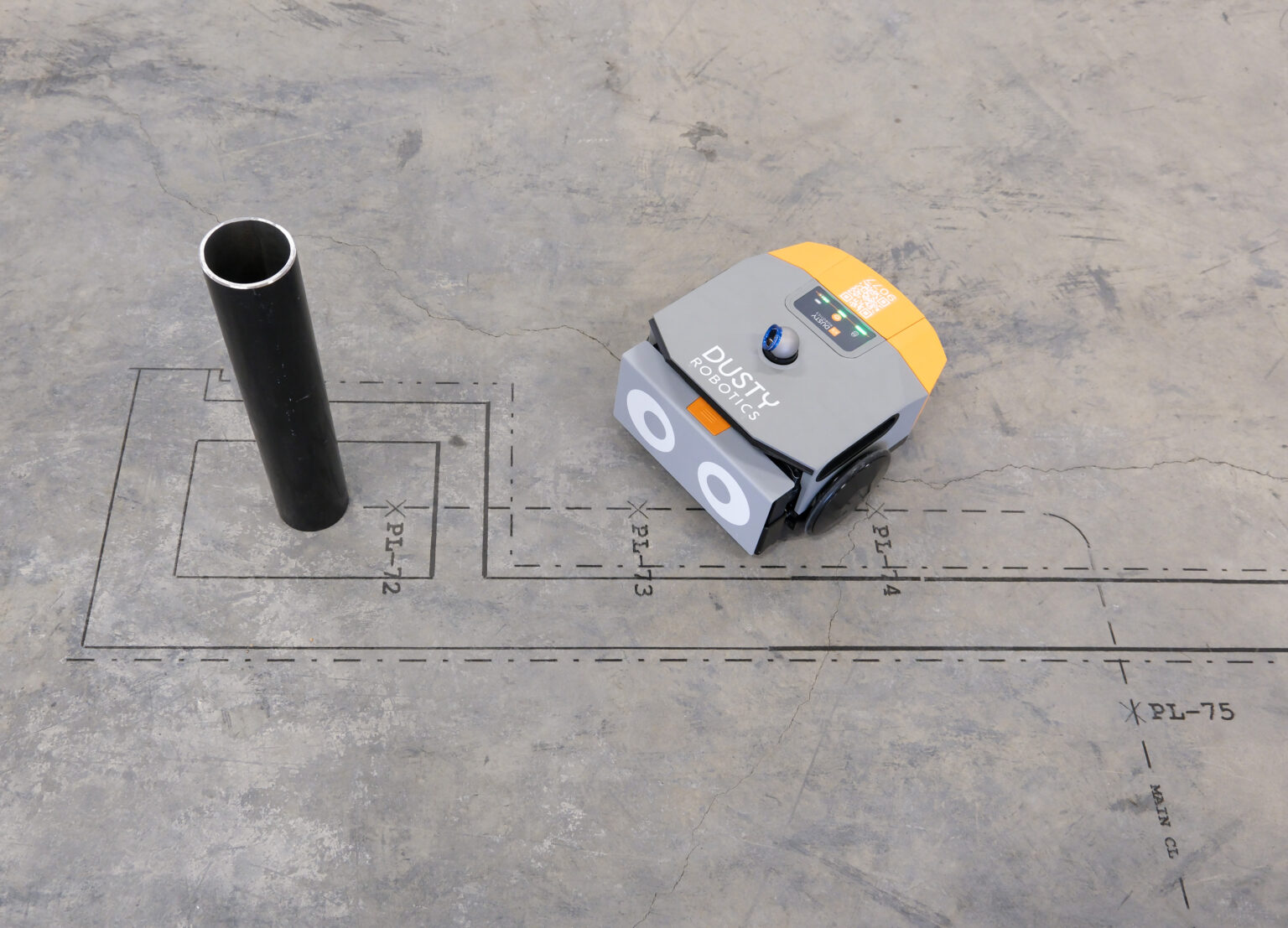
Performance Motion Devices’ N-series motion controller-drives help the Dusty AMR avoid obstacles, ledges, and other dangers. | Source: Dusty Robotics
The construction industry is under pressure. Labor shortages, rising material costs, and demand for speed and precision are pushing builders to seek automated solutions that boost efficiency, safety, and sustainability. Dusty Robotics hopes to use its technology to change this.
In most cases, plans are marked in physical spaces using old-fashioned means: Depending on the site, personnel might use a total station (a surveying instrument integrating several measurement tools) or perhaps just tape measures and chalk lines to mark where things go. The approach largely unchanged from those used centuries ago.
Huge stacks of blueprint hard copies detailing each floor and system are slowly yielding to digital communications, but information is still manually communicated onsite, explained Mike Thompson, principal engineer at Dusty Robotics. So too often, a building’s 3D model isn’t what gets built. As various trades lay out their plans, mistakes and outdated information often lead to incorrect layouts, rework, and delays.
Dusty Robotics designs the FieldPrinter 2
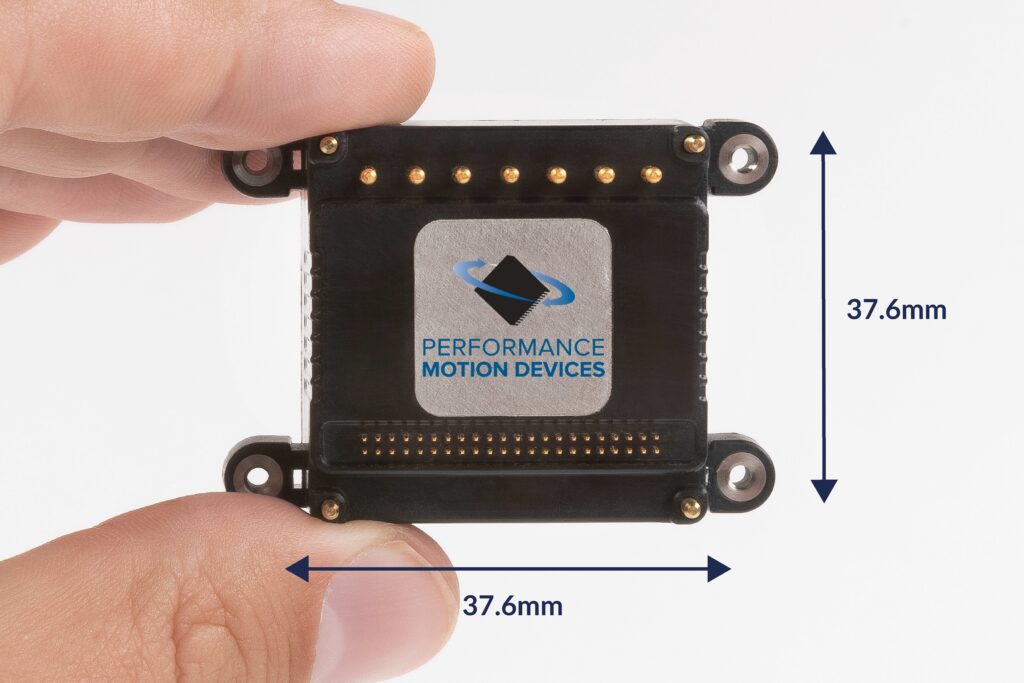
The ION/CME N-series motion-control drive imparts the Dusty design with the control needed for precise automated operation. | Source: Performance Motion Devices
Mountain View, Calif.-based startup Dusty Robotics has designed an autonomous mobile robot (AMR) called the FieldPrinter 2 to independently map and mark 3D building designs onto 2D construction floors with 0.0625-in. accuracy. With it, construction teams no longer have to constantly check their laptops, iPads, and paper plans to know what must be built and where.
Core to the AMR’s function are two off-the-shelf motion control components from Performance Motion Devices (PMD). The ION/CME N-series drives provide control and power for the AMR’s two front wheels, and more specifically, the two brushless DC electric motors (BLDCs) driving the wheels. The AMR’s rear wheel has no active drive.
The controller drives position the robot, along with a suite of onboard sensors that provide precise location information, including trackers, encoders, and inertial measurement unit gyroscopes.
“We want continuous motion between all the objects that we print,” said Ryan Dimick, controls engineer at Dusty Robotics. The system must allow for constant profile changes as the robot switches between navigating and printing.”
In fact, the new FieldPrinter 2 AMR improves on a previous iteration with the help of the PMD controller-drives. The first iteration’s use of another vendor’s motion controllers created challenges for the startup‘s developers, including an inability to understand and rectify errors without workarounds. The new controller-drive solution addresses these issues and fits into the existing platform.
More specifically, the PCB-mountable single-axis controller imparts high-performance motion control, network connectivity, and amplification for an all-in-one drive with a built-in processor. So, the robot can download and run code. Plus, the controller-drives give Dusty Robotics visibility and customizability.
“When we ran into an issue, it was always something we could fix,” Dimick said. “We overcame any latencies we had in the past and really set our own timing characteristics for the motors and motor control.”
For example, Dusty wanted to be able to modify the control loop and field-oriented control loop parameters, he added.
“[Dimick] is constantly pulling data into spreadsheets, graphing it, and looking at all the inputs and outputs to the motor controller — and understanding what small tweaks we need,” Thompson explained. “That ability to bring graphs into alignment with his expectations — that was a big challenge before.”
Dimick added, “We’re working on a millisecond-level time scale. Getting information very quickly is important for all the tuning and high-level controls, and we were not able to reach that prior to PMD.”

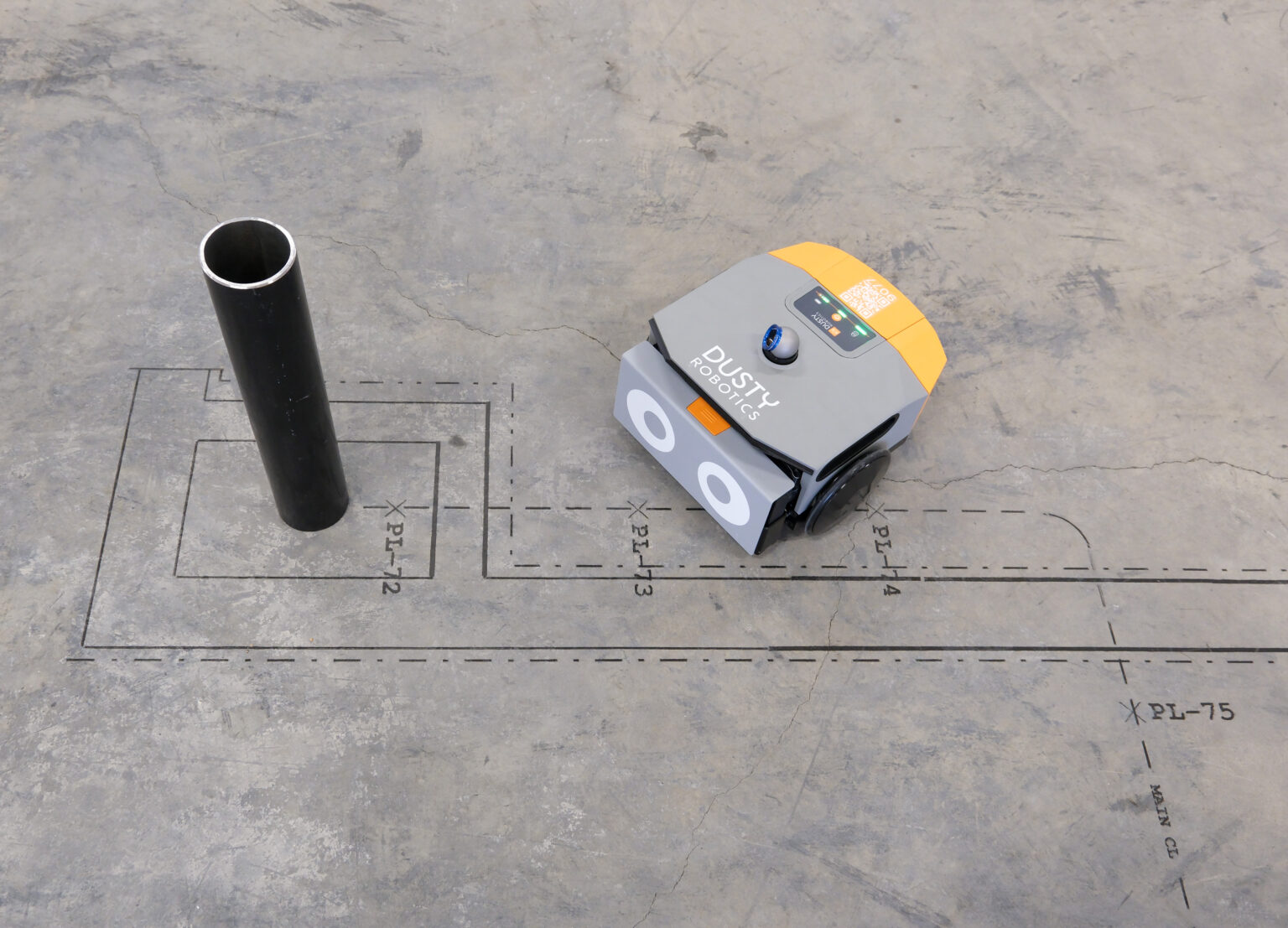
PMD’s ION/CME N-series motion control drive is instrumental to the robot’s position accuracy. PMD’s N-series drives also give the engineers access to internal control parameters to customize and troubleshoot the design. | Source: Dusty Robotics
PMD helps Dusty solve edge cases
Dusty Robotics closely collaborated with the controller-drive supplier to resolve challenges. “Anytime I was integrating the controller into the product and had questions, they were quick to jump on a call, and they even released a custom debug version for me to temporarily use for diagnosing an issue,” said Dimick.
This collaboration also informed the AMR manufacturer’s industrial-communication choice.
The controller drive supports communication via Ethernet, CAN, RS-232, RS-485, and serial peripheral interface. Dusty wanted certain communications coming in a slightly later version of the controller-drive.
“So, we waited, and I think we were one of the first to really use it,” he recalled. “Then we helped [the supplier] debug the firmware, and they quickly returned new versions for us to use.”
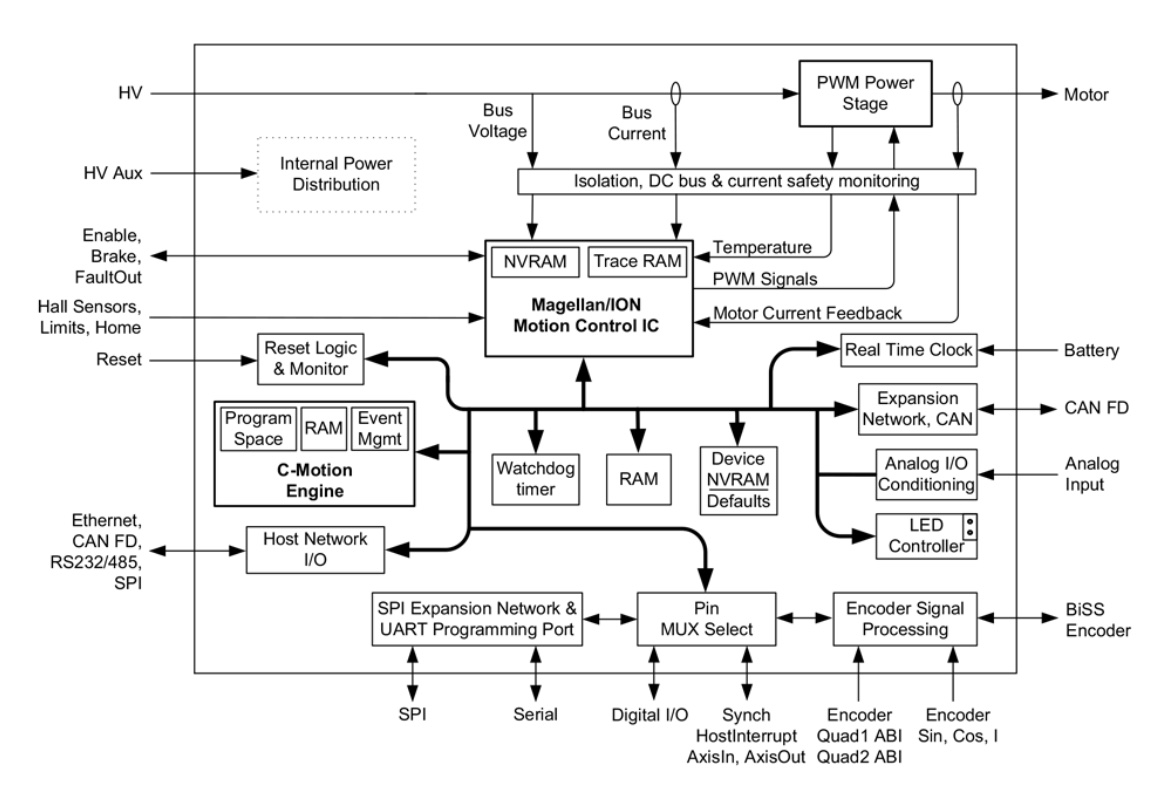
A black diagram of the PMD N-Series ION. | Source: Performance Motion Devices
The Dusty FieldPrinter 2 has a laser tracker that continuously reports AMR position — but often the tracker doesn’t have a view of the robot, so operation is blind. But the controller-drive (in conjunction with the robot’s sensors) keeps the AMR on track.
“When the robot is printing within a blind spot, not visible to the tracker, it’s relying on the inertial measurement unit and encoders that are coming through the controller. It’s relying on all the other sensors for five, 10, 15 seconds of continuous printing,” Thompson explained. “Then, when it comes out of the blind spot, it tells the tracker exactly where it is. We need to give that tracker the accuracy so it can very quickly and precisely acquire the signal.”
Here, sub-millisecond timing precision helps the AMR handle blind spots so common at cluttered jobsites. “That information and smooth predictable motion lets the AMR accurately estimate its location and continue printing without line-of-sight to the laser tracker,” said Dimick. This blind-spot printing is the biggest improvement of the new AMR version.
The controller-drive can also apply an electronic brake to the AMR’s motors. A bit of Dusty’s own software, running on one of the controller’s chips, serves as a watchdog. If it loses communication to the robot, it powers down the motors.
As the company name implies, Dusty Robotics’ system must operate in dirty environments and in all kinds of weather — in the Arizona sun, as well as the 14th floor of a Chicago building under construction when it’s -20° F — and with unknown obstacles and spotty Internet connectivity.
Unlike competing solutions that leave sensitive electronics exposed, PMD said the controller-drive used in the FieldPrinter 2 comes standard with an enclosed package to protect internal components. Future iterations of the robot could see higher levels of integration.
“PMD provides a pathway for us,” Thompson said. “They provide the controllers themselves and can open their controllers and give us access to the independent parts to let us create a highly integrated solution.”
“It’s something that we haven’t really pursued but lets us preserve the investment that the engineers have made … and still make the system faster and lighter than it is today,” he added.
 About the author
About the author

Chuck Lewin is the founder and CEO of Performance Motion Devices. Launched in 1992, PMD is headquartered near Boston. It is a developer of motion control technology for life sciences, robotics, and industrial automation. PMD delivers a broad range of advanced electronic motion control products, including integrated circuits, digital amplifiers, digital drives, and boards to a worldwide customer base.
Editor’s note: This article was syndicated from The Robot Report sibling site, Motion Control Tips.

The post Dusty Robotics designs FieldPrinter 2 robot with PMD motion controllers appeared first on The Robot Report.