

ADAR enables 3D 360-degree obstacle detection at a lower cost than conventional sensor packages. | Source: Sonair
Killer drones. Terminator-type humanoids. A Murderbot on every corner. These dystopian visions of the future in which human-robot relations are in a state of constant conflict abound in books and movies.
But in the real world, humans and robots peacefully coexist every single day in factories, warehouses, hospitals, and homes. This is thanks, in large part, to the robot safety standards developed over decades by global experts.
So, while talk of peaceful human-robot coexistence might sound a little dramatic, it’s no exaggeration to say that without robot safety standards, there would be no effective human-robot coexistence or collaboration at all. There would, in fact, be chaos.
Why robot safety standards matter
Robot safety standards are guidelines and regulations developed to ensure robots operate safely around humans. Safety standards define requirements for the design, integration, operation, and maintenance of hardware and software. This minimizes the risk of collisions and injury.
Standards outline factors such as safe distances, speed limits, emergency stop functions, and risk assessment. These structured safety requirements reduce uncertainty and create predictable, controlled environments for safe human-robot interaction. While no system is safe in every conceivable circumstance, standards mean that humans can trust the robots they share spaces with.

Save now with early bird discount
Human-robot safety is a complex landscape
To say that the global robot safety landscape is complex is a massive understatement. First, there is more than one standards body developing robot safety standards.
The International Organization for Standardization (ISO), Robotic Industries Association (RIA, now part of the Association for Advancing Automation or A3), and European Standards (EN) are the best known and most widely adopted globally and in North America and Europe. However, there are others in Japan, China, and India to keep track of as well.
Then there is the fact that standards can have different names in different jurisdictions. For example, ISO 10218 is a global standard for industrial robot safety. In Europe, it is implemented as EN ISO 10218. In Japan, it’s implemented as JIS B 8433-1/2. And finally, in the U.S., it has been incorporated into the ANSI/RIA R15.06 standard.
Moreover, different regions enforce standards differently. For example, standards that are compulsory in Europe may be voluntary in the U.S., and vice versa. In addition, more than one set of standards bodies can operate in a single region.
Achieving safety certification according to established standards is an onerous but necessary task for any serious original equipment manufacturer (OEM). And, while it is not required by law in many regions, a key part of the task involves sending the product off to accredited independent, third-party testing facilities and organizations such as ASTM International. This also means waiting patiently while the product is rigorously tested for compliance with safety requirements.
How compliance works with no ‘standards police’
If compliance with robot safety standards is often voluntary and there are no “standards police” — or robo cops — to enforce these requirements, then how can they possibly be effective?
The good news for humans who work around robots is that even in regions where compliance and third-party testing are voluntary, businesses demand compliance from one another. Warehouses want autonomous mobile robots (AMRs) that comply with internationally recognized standards. Manufacturing facilities want industrial robots that don’t strike humans who happen to walk by. Standards are key to ensuring safety across these different robot types and environments.
Even though it’s not required by law in all regions, businesses will get third-party safety specialists to confirm whether or not their products meet the applicable standards. In this way, the robotics industry enforces standards requirements almost by default by enforcing the expectation that products comply with relevant standards.
Navigating complex and lengthy standards
There are standards for mobile robots, sensors, and complete robot cells. And, there are standards for the software that enables machine-to-machine communication. There are standards for every piece of a robot, down to its internal cables. There are standards for OEMs and integrators. Finally, there are standards that end users need to be aware of, too.
Standards often run to hundreds of pages, and they dive into great detail. In fact, part of standards compliance involves wrestling with the complex language. This means reading and re-reading the standards until they are fully and accurately absorbed.
One critical difference, for example, centers around the difference between “shall” (which means required) and “should” (which means recommended). Achieving compliance means painstakingly working through every sentence and sub-clause in the standards documentation.
Some of the most important and widely adhered to safety standards include:
- ISO 12100:2010, which specifies basic terminology, principles, and a methodology for achieving safety in machine design while outlining the principles of risk assessment and risk reduction to help designers achieve this objective
- ISO 3691-4:2023, which specifies safety requirements for “driverless industrial trucks,” a term that includes AMRs
- ISO 10218-1:2025, which establishes guidelines for safety requirements specific to industrial robots, and which received a substantial update just a few months ago
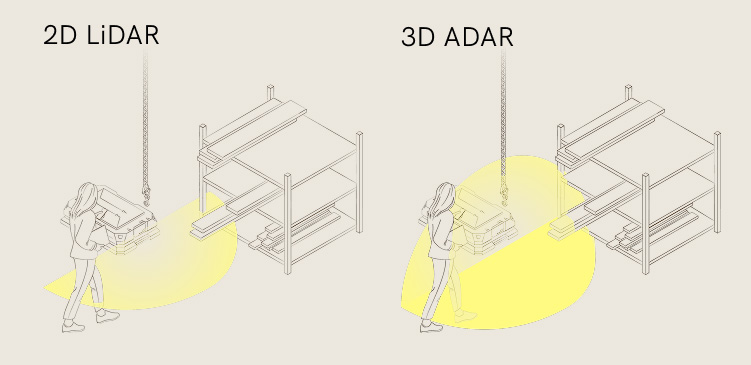
2D safety lidars are typically mounted on AMRs at a height of around 20 cm (7.9 in), and won’t detect objects 10 cm (3.9 in.) above the floor, objects hanging from the roof, or items sticking out from walls or shelves. These limitations present safety risks in dynamic shops. Different lighting conditions and transparent surfaces can also create challenges for lidar. In contrast, ADAR provides a 360-degree (180° by 180°) view of the scene up to a distance of 5 m (16.4 ft.), creating a 3D safety shield for obstacle detection. | Source: Sonair
Sonair follows sensor standards
One of the standards that’s of particular interest to us here at Sonair is IEC 61496-1:2020. This document specifies general requirements for the design, construction, and testing of non-contact, electro-sensitive protective equipment (ESPE) — sensors designed specifically to detect people or a part of a person as part of a safety-related system.
This document defines functional safety requirements for the sensors used for “obstacle detection,” including humans and parts of humans. In other words, the ability of robots like AMRs to come to a stop when it detects people or property in its way.
As the ADAR sensor by Sonair is for obstacle detection, we’re aiming for full compliance with IEC 61496.
In addition to being tested in the field as part of an early-access program, the Sonair sensor and the development process are undergoing rigorous assessment by independent safety specialists, exida. It is an ANSI-accredited certification agency that assesses and certifies standards compliance. exida’s rigorous process includes verifying the Safety Integrity Level (SIL) of a product’s hardware and software design.
The testing and certification processes are painstaking, but they are essential for two main reasons. Firstly, safety matters. Successful human-robot interaction today and into the future depends on humans being able to trust that the robots around them do not present safety risks. Without standards, there will be no human-robot coexistence at all.
Secondly, safety certification is, well, standard across the robotics industry – even for innovative sensors like Sonair’s, which is set to become a safety-certified 3D depth sensor (Pl d). We expect to complete the third-party testing and certification process by the end of 2025.
 About the author
About the author

Britta Fismen is vice president of engineering and co-founder at Sonair, based in Oslo, Norway. She has more than 20 years of experience in sensor development, optics, and research and development, including senior roles at GasSecure and SINTEF. Fismen holds an M.Sc. in applied physics from the Norwegian University of Science and Technology (NTNU) and has led groundbreaking work in optical instrumentation and wireless gas detection.
The post A beginner’s guide to safe human-robot collaboration appeared first on The Robot Report.