
At TUM MIRMI’s AI Robot Safety & Performance Centre, researchers Kübra Karacan, Robin Kirschner, and Alessandro Melone (rom left to right) have analyzed the sensitivity of robotic manipulators. | Credit: TUM
Researchers at the Munich Institute of Robotics and Machine Intelligence, or MIRMI, at the Technical University of Munich have created a “Tree of Robots,” a new evaluation scheme to measure the sensitivity of autonomous robots. Sensitivity is crucial for safe and flexible human-robot interaction, and there hasn’t been a standard way to assess it, they said.
The Technical University of Munich (TUM) researchers said new scheme will enable the comparison of industrial robots and, eventually, other robotic systems, such as mobile platforms, humanoids, and robotic hands.
“Such a standard could pave the way for a quality seal for the rapidly expanding robotics market,” asserted Prof. Achim Lilienthal, deputy director of MIRMI and professor of intelligent systems perception at TUM. “Knowing the performance capabilities of a robot system is an enormous help to industry, where companies want to make the best possible use of robotic systems.”
“The TUM MIRMI test methodology has the potential to become an industrial testing standard,” he said. “Knowing the performance capabilities of a robot system is an enormous help to industry, where companies want to make the best possible use of robotic systems.”
Categorization leads to Tree of Robots
The researchers began by examining and categorizing single-armed robots from various manufacturers that are used in both industry and research.
Despite often appearing similar, these robotic arms possess distinct characteristics in their sensors, motors, and internal control systems. This leads to substantial differences in their fundamental capabilities: some excel in power and precision, while others are designed for flexible and sensitive interaction with their surroundings and workpieces.
To illustrate these variations and the ongoing advancements in robotics, researchers at TUM MIRMI’s AI Robot Safety & Performance Centre created the Tree of Robots. Inspired by Charles Darwin’s Tree of Life, this visualization illustrates the diverse adaptations of various robot species to their respective habitats.
The researchers identified 25 specific measurements to describe a robot’s sensitivity during physical contact. These measurements help determine if the force applied to a surface aligns with the intended force, for example, or if a robot could injure a human.
A spider diagram generated from these 25 measurements allows for a quick visual assessment of a robot’s sensitivity, even for those without specialized knowledge.
Based on their performance, robotic systems are categorized as industrial robots, cobots, soft robots, and “tactile robots.” Surgical robots, for instance, are primarily evaluated on their precision. For warehouse or factory applications, the emphasis shifts to strength and resilience—their ability to perform repetitive movements over extended periods.
“We combine existing motion metrics with our new tactile metrics to provide the first-ever overview of the totality of the basic capabilities for physical interactions of a robotic system,” noted lab director Robin Kirschner.
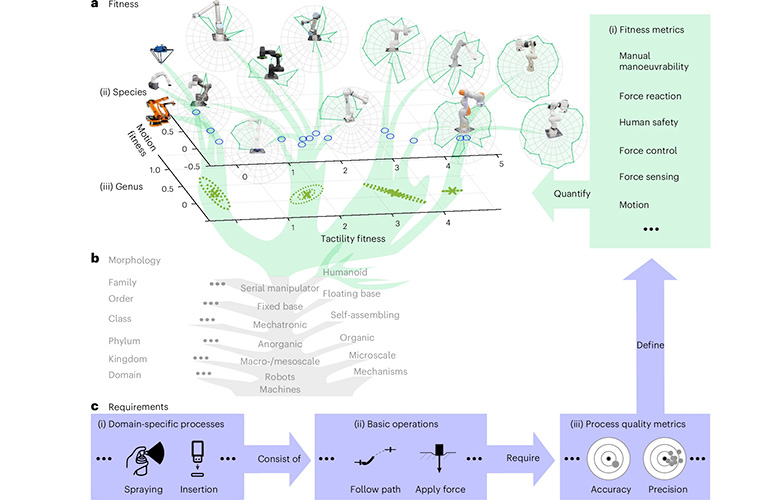
A taxonomy consisting of the components based on system architecture (grey), embodiment performance (green) and process (blue). a, The robot-fitness-based classification: (i) the fitness metrics that define the green spider plots, namely, the robot fitness spectrum; (ii) the species of an embodiment defined by the overall fitness score plotted over motion and tactility fitness; (iii) genus groups clustering the robot species into process-based fitness categories. b, Hierarchical morphology representation. c, Requirements for process automation that are transferred into the required robot fitness metrics by (i) identification of domain-specific processes; (ii) deduction of the required basic operations; (iii) quality metrics describing the process that define the required embodiment fitness metrics. | Credit: TUM
TUM could be German testing center for robots
The team published a research paper titled “Categorizing robots by performance fitness into the tree of robots” in Nature in February 2025.
Prof. Lorenzo Masia, executive director of TUM MIRMI, added: “Based on the original idea, I am certain that the AI Robot Safety & Performance Centre at TUM MIRMI will develop into an independent national testing center for robotics.”
A five-member board of directors oversees TUM MIRMI’s research and innovation strategy, core teaching content, and the establishment of new focus groups. The board includes:
- Prof. Masia, executive director
- Prof. Lilienthal, deputy director and director of strategy and partnerships
- Prof. Angela Schoellig, director of industry and international affairs
- Prof. Eckehard Steinbach, director of startups and infrastructure

The post Unveiling the Tree of Robots: A new taxonomy for understanding robotic diversity appeared first on The Robot Report.